Armlab Camera Stuff
Last Updated: Sep 09, 2024
This guide covers the use of the RealSense L515 camera in Armlab. It’s for students who want to troubleshoot or get the most out of the camera.
Contents
RealSense Viewer
To launch the viewer, run:
realsense-viewer
This is the official GUI for viewing the camera stream. Use it if the camera isn’t streaming properly on the control station. If the stream looks good in the RealSense Viewer, the camera is functioning properly.
User Interface
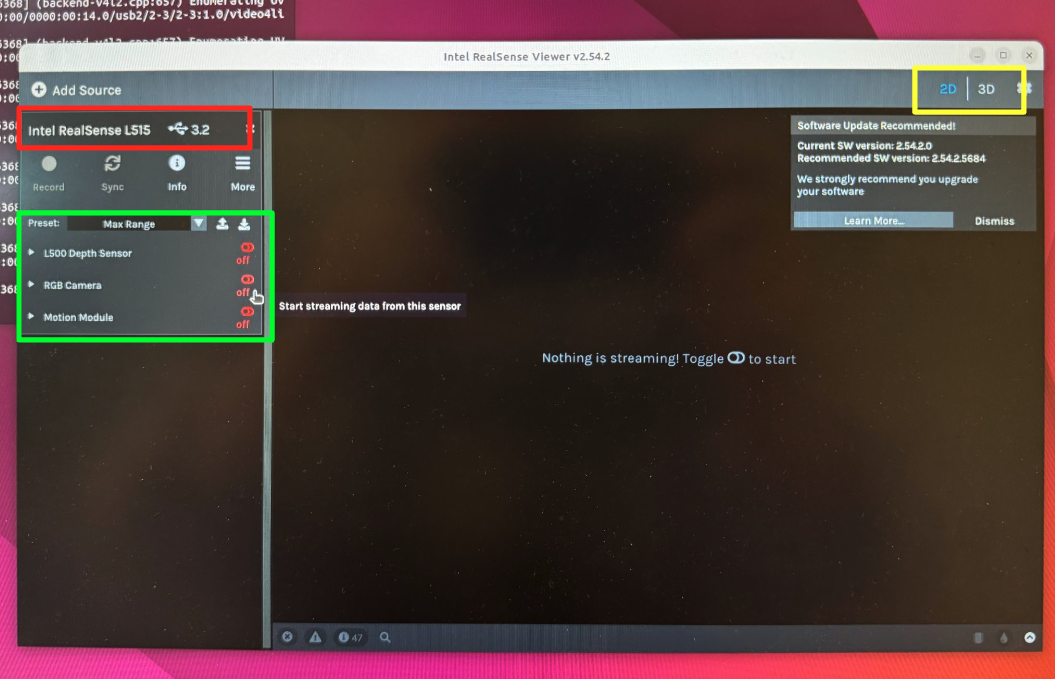
In the image above:
- Red box: Camera model and USB version. Ensure USB 3.2, not USB 2.0, for the launch file to work correctly.
- Green box: RGB and Depth cameras. Both are off in the image, so the view is blank.
- Yellow box: 2D/3D selection. Choose 2D to check the 2D stream.
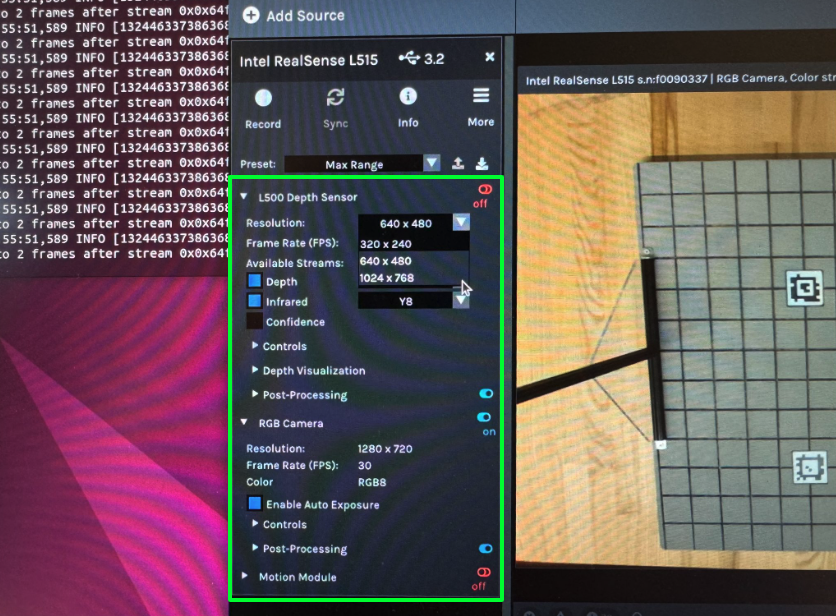
- L500 Depth Sensor: It’s off here, allowing you to see available resolution options.
- RGB Camera: It is on and streaming the checkerboard. You can’t change resolution when the camera is on.
Armlab Default Settings
If you’re troubleshooting camera issues or launch file errors, follow these steps:
- Open
realsense-viewerand check that the camera is connected via USB 3.0, not USB 2.0. If only USB 2.0 is available, inform your instructor. - Next, if you have USB 3.0 cable, ensure the launch file
install_scripts/config/rs_l515_launch.pyhas the correct resolution settings. In the file looking for these 2 lines:{'name': 'depth_module.profile', 'default': '1024,768,30', 'description': 'depth module profile'}, ... {'name': 'rgb_camera.profile', 'default': '1280,720,30', 'description': 'color image width'},- The resolutions above are default.
1024,768for depth module,1280,720for rgb camera. Mismatched resolutions will cause errors incamera.py.
- The resolutions above are default.
- To apply the changes, copy
rs_l515_launch.pyto the system path:cd install_scripts ./install_LaunchFiles.sh - Verify that the camera initialization in
src/camera.pymatches with the launch file above:def __init__(self): """! @brief Construcfalsets a new instance. """ self.VideoFrame = np.zeros((720,1280, 3)).astype(np.uint8) self.GridFrame = np.zeros((720,1280, 3)).astype(np.uint8) self.TagImageFrame = np.zeros((720,1280, 3)).astype(np.uint8) self.DepthFrameRaw = np.zeros((720,1280)).astype(np.uint16) """ Extra arrays for colormaping the depth image""" self.DepthFrameHSV = np.zeros((720,1280, 3)).astype(np.uint8) self.DepthFrameRGB = np.zeros((720,1280, 3)).astype(np.uint8) ... - Then run the
launch_armlab.shlaunch file. If problems persist, capture screenshots of error messages and send them to course Discord for assistance.