Design Lab
Last Updated: Mar 26, 2026
Contents
Objective: Autonomous warehouse robot
Design and build a forklift mechanism for the MBot to autonomously locate, pick up, and deliver pallets in a warehouse setup.
The forklift should be 3D printed, servo-actuated, and mountable to the MBot chassis. Your robot will use its camera and LiDAR to navigate around traffic cones, and deliver cargo to designated storage areas.
The final system will integrate mechanical design, servo control, and vision-based perception for autonomous operation.
System overview

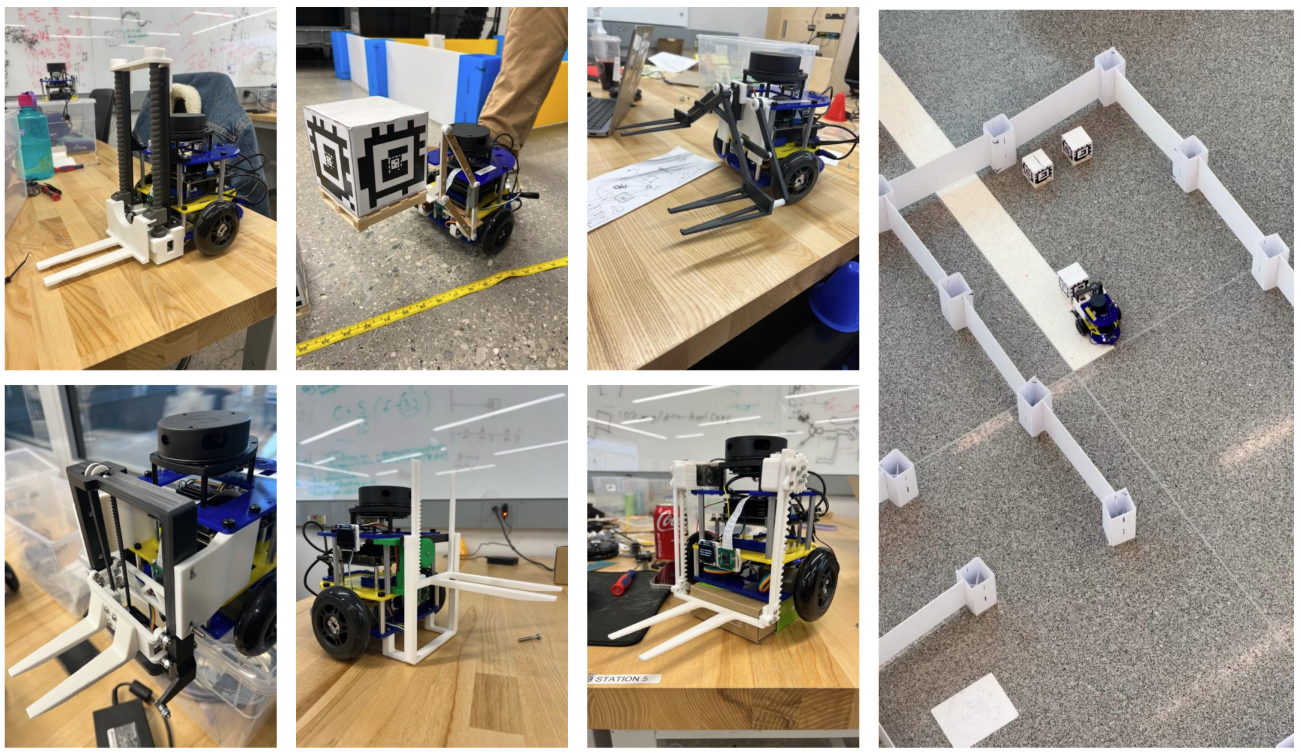
Example photos from past semester projects
Provided Materials
MBot CAD file
Open Simplified Model in new tab <- Use this link to download.
Servo control library
We provide Dynamixel XL330-M288 and XL430-W250. The assembly guide, library, and example code are available in: mbot_servo_lib Guide.
Deliverables
- Phase 1: 3D CAD model of your forklift assembly (due with checkpoint 2)
- Phase 2: Working prototype mounted on MBot (testing and improving)
- Phase 3: Autonomous pick-up and delivery (competition)
Document your forklift design, including:
1. Detailed drawings
2. Bill of Materials (BOM)
3. Step-by-step instructions:
- How is it assembled?
- How does the mechanism work?
- How do the servos coordinate and operate together?